1.1. Разновидности архитектур
Существует огромное разнообразие датчиков (температуры, влажности, давления, потока, скорости, ускорения, вибрации, веса, натяжения, частоты, момента, освещенности, шума, объема, количества теплоты, тока, уровня и др.), см. [Фрайден], которые преобразуют физическую величину в электрический сигнал. Если параметры сигнала не согласуются с параметрами входа аналого-цифрового преобразователя (АЦП) или не соответствует стандарту (например, входной величиной АЦП является напряжение в диапазоне 0...10 В, а датчик (термопара) имеет выходное напряжение в диапазоне от 0 до 100 мВ), то используют измерительный преобразователь (рис. 1.1) , который обеспечивает нормализацию сигнала датчика (приведение к стандартным диапазонам изменения, обеспечение линейности, компенсацию погрешности, усиление и т. п.). Измерительные преобразователи обычно совмещают с модулями аналогового ввода.
Измерительные преобразователи могут иметь встроенный АЦП или ЦАП (цифро-аналоговый преобразователь), а также микропроцессор для линеаризации характеристик датчика и компенсации погрешностей аналоговой части системы. В последнее время получили распространение цифровые датчики, объединяющие в себе первичный преобразователь физической величины в электрический сигнал, измерительный преобразователь и АЦП. Примером могут служить датчики температуры DS18B20 фирмы Dallas Semiconductor, у которых выходной сигнал является цифровым и соответствует спецификации интерфейса 1-Wire (www.maxim-ic.com).
Для ввода в компьютер аналоговых сигналов служат модули аналогового ввода (рис. 1.1). Модули ввода могут быть общего применения (универсальные) или специализированные. Примером универсального модуля ввода является NL-8AI серии RealLab!, который воспринимает сигналы напряжения в диапазонах ±150 мВ, ±500 мВ, ±1 В, ±5 В, ±10 В и тока в диапазоне ±20 мА. Примером специализированного модуля является модуль ввода сигналов термопар NL-8TI фирмы RealLab!, который работает только с термопарами и содержит встроенные во внутреннюю память модуля таблицы поправок для компенсации нелинейностей термопар и температуры холодного спая.
Кроме модулей аналогового ввода широко распространены модули дискретного ввода, которые не содержат АЦП и позволяют вводить сигналы, имеющие два уровня (например, сигналы от концевых выключателей, датчиков открывания двери, пожарных датчиков, охранных датчиков движения и т. п.). Уровни входных сигналов модулей дискретного ввода могут изменяться в диапазоне, как правило, 0...24 В или 0..220 В. Модули с входом 220 В используются, например, для регистрации наличия напряжения на клеммах электродвигателя или нагревательного прибора.
Отдельное место занимают устройства счетного ввода, которые имеют дискретный вход и позволяют считать количество или частоту следования импульсов. Их используют, например, для измерения скорости вращения вала электродвигателя или подсчета продукции на конвейере.
Компьютер обычно является «мозгом» автоматизированной системы. Он принимает сигналы датчиков, исполняет записанную в него программу и выдает необходимую информацию в устройство вывода. Коммуникации между компьютером и устройствами ввода-вывода выполняются через последовательные интерфейсы, например, USB, CAN, RS-232, RS-485, RS-422, Ethernet или параллельный интерфейс LPT. Иногда устройства ввода-вывода выполняют в виде плат, которые вставляют непосредственно в компьютер, в разъемы шины PCI или ISA. Достоинством плат является возможность получения высокой пропускной способности каналов ввода-вывода (свыше 10 Мбит/с), что трудно достижимо при использовании внешних устройств с последовательным портом. Недостатком является более высокий уровень электромагнитных наводок от компьютера и конструктивные ограничения на количество каналов ввода-вывода.
|
|
|
Рис. 1.1. Простейший вариант автоматизированной системы с одним компьютером и одним устройством ввода и вывода
|
В автоматизированных системах вместо компьютера или одновременно с ним часто используют программируемый логический контроллер (ПЛК). Типовыми отличиями ПЛК от компьютера является специальное конструктивное исполнение (для монтажа в стойку, панель, на стену или в технологическое оборудование), отсутствие механического жесткого диска, дисплея и клавиатуры. Контроллеры также имеют малые размеры, расширенный температурный диапазон, повышенную стойкость к вибрации и электромагнитным излучениям, низкое энергопотребление, защищены от воздействий пыли и воды, содержат сторожевой таймер и платы аналогового и дискретного ввода-вывода, имеют увеличенное количество коммуникационных портов. В контролерах, в отличие от компьютеров, как правило, используется операционная система реального времени (например, Windows CE, QNX).
В последнее время наметилась тенденция стирания грани между компьютером и контроллером. С одной стороны, контроллеры (например, NLcon-CE фирмы RealLab! или WinCon фирмы ICP DAS) позволяют подключить монитор, мышь и клавиатуру, с другой стороны, появилось большое количество промышленных компьютеров, которые имеют специальное конструктивное исполнение и другие свойства, характерные для контроллеров. В связи с этим в дальнейшем мы будем употреблять термины "компьютер", и "контроллер" как синонимы, и это будет ясно из контекста.
Устройства вывода (модули вывода) позволяют выводить дискретные, частотные или аналоговые сигналы. Дискретные сигналы используются, например, для включения электродвигателей, электрических нагревателей, для управления клапанами, фрамугами, насосами и другими исполнительными устройствами. Частотный сигнал используется обычно для управления средней мощностью устройств с большой инерционностью с помощью широтно-импульсной модуляции.
1.1.1. Требования к архитектуре
Архитектура автоматизированной системы - это наиболее абстрактное ее представление, которое включает в себя идеализированные модели компонентов системы, а также модели взаимодействий между компонентами. Элементы* архитектуры находятся во взаимосвязи, образуя единую автоматизированную систему и обеспечивая решение поставленной задачи автоматизации на архитектурном уровне. В то же время архитектура оставляет достаточно свободы для выбора конкретных технических решений [Клир]. Поэтому правильно спроектированная архитектура допускает множество технических реализаций путем выбора различных компонентов архитектуры и методов взаимодействия между ними.
Элементами архитектуры являются модели (абстракции) датчиков, устройств ввода-вывода, измерительных преобразователей, ПЛК, компьютеров, интерфейсов, протоколов, промышленных сетей, исполнительных устройств, драйверов, каналов передачи информации.
Архитектуру создает архитектор [Клир]. Основным требованием к архитектору является знание предметной области (принципов функционирования объекта автоматизации) и знание технических характеристик аппаратных и программных средств, используемых для построения системы.
При построении архитектуры должны быть заложены следующие свойства будущей автоматизированной системы:
- слабая связанность элементов архитектуры между собой (т. е. декомпозицию системы на части следует производить так, чтобы поток информации через связи был минимален и через них не замыкались контуры автоматического регулирования);
- тестируемость (возможность установления факта правильного функционирования);
- диагностируемость (возможность нахождения неисправной части системы);
- ремонтопригодность (возможность восстановления работоспособности за минимальное время при экономически оправданной стоимости ремонта);
- надежность (например, путем резервирования);
- простота обслуживания и эксплуатации (минимальные требования к квалификации и дополнительному обучению эксплуатирующего персонала);
- безопасность (соответствие требованиям промышленной безопасности и технике безопасности);
- защищенность системы от вандалов и неквалифицированных пользователей;
- экономичность (экономическая эффективность в процессе функционирования);
- модифицируемость (возможность перенастройки для работы с другими технологическими процессами);
- функциональная расширяемость (возможность ввода в систему дополнительных функциональных возможностей, не предусмотренных в техническом задании);
- наращиваемость (возможность увеличения размера автоматизированной системы при увеличении размера объекта автоматизации);
- открытость (см. раздел "Понятие открытой системы");
- возможность переконфигурирования системы для работы с новыми технологическими процессами;
- максимальная длительность жизненного цикла системы без существенного морального старения, достигаемая путем периодического обновления аппаратных и программных компонентов, а также путем выбора долгоживущих промышленных стандартов;
- минимальное время на монтаж и пуско-наладку (развертывание) системы.
Архитектура системы может быть различной в зависимости от решаемой задачи автоматизации. Такими задачами могут быть:
- мониторинг (продолжительные измерение и контроль с архивированием полученной информации);
- автоматическое управление (в системе с обратной связью или без нее);
- диспетчерское управление (управление с помощью человека-диспетчера, который взаимодействует с системой через человеко-машинный интерфейс);
- обеспечение безопасности.
Любая из перечисленных задач может выполняться на большом расстоянии между объектом автоматизации и системой. В этом случае говорят о задачах телемеханики (дистанционные измерение, управление, сигнализация). Однако, в связи с тем, что каналы дистанционной связи (интернет, радиоканал, оптико-волоконный канал, проводной канал) органично входят практически в любую систему автоматизации, задачу телемеханики все реже выделяют как самостоятельную.
Построение любой АСУ** начинается с декомпозиции (деления на части) системы на подсистемы. Декомпозиция может быть функциональной (алгоритмической) или объектной.
При объектной декомпозиции используются распределенные системы управления (см. п. 1.1.3), когда каждый объект автоматизации оборудуется локальным технологическим контроллером, решающим задачи в пределах этого объекта. При функциональной декомпозиции систему автоматизации делят на части, группируя сходные функции, и для каждой группы функций используют отдельный контролер. Оба вида декомпозиции могут быть использованы совместно. Выбор способов декомпозиции является творческим процессом и во многом определяет эффективность будущей системы.
Объектная декомпозиция объекта автоматизации используется в современных SCADA-пакетах, см., например [Аблин]. Она аналогична объектной декомпозиции, используемой в объектно-ориентированном программировании (ООП), основными признаками которой являются абстрагирование, инкапсуляция, модульность, иерархическая организация [Буч]. Классам ООП соответствуют контроллеры (ПЛК), объектам - контроллеры с заданными свойствами (параметрами), инкапсуляция соответствует сокрытию конкретной реализации (например, с помощью функциональных блоков языка IEC 61131-3 (см. раздел "Программное обеспечение")); благодаря инкапсуляции существенно упрощается структура системы с точки зрения системного интегратора и тем самым уменьшается количество возможных ошибок. Модульность обеспечивается модульностью аппаратного обеспечения системы, иерархичность естественным путем вытекает из требований заказчика.
Независимо от метода декомпозиции, основным ее результатом должно быть представление системы в виде набора слабо связанных частей. Слабая связь между частями системы означает отсутствие между ними обратных связей или малость модуля петлевого усиления при наличии таких связей, а также отсутствие интенсивного обмена информацией.
Программные модули, реализующие отдельные функции в разных контроллерах, могут взаимодействовать между собой по промышленной сети с помощью технологии СОМ фирмы Microsoft, CORBA консорциума OMG [Причард] или SOAP консорциума W3C [Ньюкомер]. Для разработки заказного программного обеспечения распределенных систем управления используют специальную среду разработки систем реального времени [Kim] или стандартное программное обеспечение на основе технологии DCOM фирмы Microsoft (см. раздел "Программное обеспечение"). В статье [Perez-Aragon] приводится пример системы, в которой разные функции управления представлены в виде компонентов, написанных с помощью CORBA, распределенных между разными контроллерами либо сгруппированных в одном из них. В работе [Sunder] предлагается способ построения архитектуры системы на основе "ячеек автоматизации", при котором на разных уровнях иерархии используются одни и те же ячейки с одним и тем же программным обеспечением, что делает систему однородной несмотря на иерархичность и поэтому снижает трудоемкость ее проектирования и обслуживания.
Более подробно программное обеспечение систем автоматизации будет рассмотрено в разделе "Программное обеспечение".
** АСУ - автоматизированная система управления
1.1.2. Простейшая система
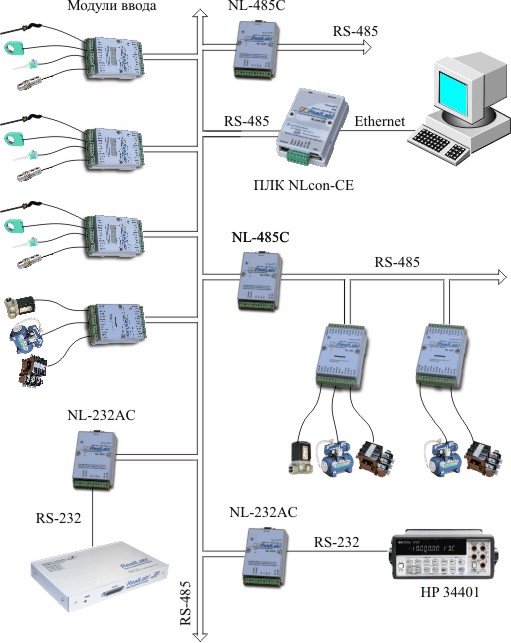
Изображенная на рис. 1.1 система в зависимости от ее назначения и программного обеспечения может быть системой сбора данных, системой диспетчерского или автоматического управления, системой контроля, испытаний, диагностики и т.д. Это простейший вариант автоматизированной системы, построенной на основе одного компьютера, устройств ввода-вывода, датчиков и исполнительных устройств (актуаторов).
На рис. 1.1 датчики подсоединены к одному многоканальному измерительному преобразователю. Однако различные типы датчиков могут требовать различных типов преобразователей или работать вообще без них. Некоторые типы интеллектуальных датчиков имеют интерфейс RS-485 и могут подключаться непосредственно к компьютеру (контроллеру), как, например, датчики серии NL-1S фирмы RealLab!.
Системы мониторинга (наблюдения) за физическими процессами не содержат исполнительных устройств или используют электромагнитные (реже полупроводниковые) реле для коммутации измерительных цепей.
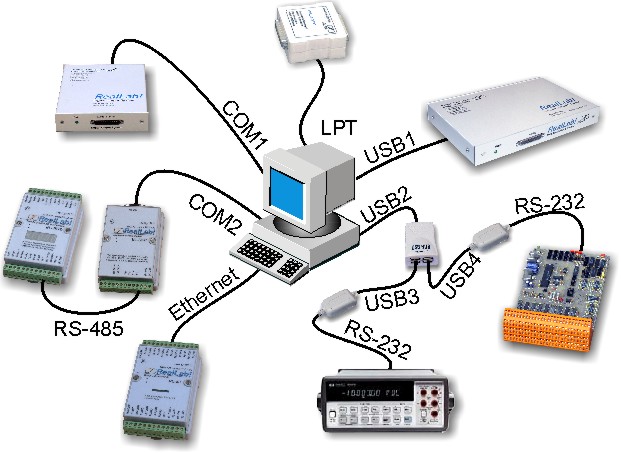
Обычный офисный компьютер в стандартной конфигурации имеет два порта USB, один СОМ-порт, один принтерный порт LPT и порт Ethernet, который появляется после установки в компьютер Ethernet-платы. Количество USB портов можно увеличить с помощью USB хабов, а количество COM-портов - с помощью преобразователя USB в COM. Промышленные компьютеры и контроллеры обычно имеют несколько портов RS-485, RS-422 и оптоволоконный порт. Для применения оптического канала с офисным компьютером к нему можно подключить оптоволоконный преобразователь интерфейса. Все перечисленные порты можно использовать для обмена информацией межу компьютером и внешними устройствами (рис. 1.2).
|
|
|
Рис. 1.2. Для подключения устройств ввода-вывода могут быть использованы все порты компьютера
|
Для увеличения дальности передачи сигнала по линии связи до 1,2 км можно использовать преобразователи интерфейсов RS-232 в RS-485 или RS-422, а также интерфейс «токовая петля» (см. раздел "Промышленные сети и интерфейсы").
Внешние устройства, не имеющие гальванически изолированного порта, обычно подключают к компьютеру через изолирующие преобразователи интерфейсов, которые защищают компьютер от случайного попадания высокого напряжения в случае аварии или небрежного обращения. Примером изолирующего преобразователя для порта RS-232 может быть оптический изолятор OI-232-1000 (см. описание ) фирмы RealLab! c напряжением изоляции 1000 В.
Если к компьютеру необходимо подключить еще одно устройство, а свободных портов не осталось, то можно использовать разветвители интерфейсов. Распространены разветвители интерфейсов USB (их еще называют хабами) и RS-232. Устройство, имеющее интерфейс RS‑232, можно подключить к USB порту компьютера, если использовать преобразователь USB в RS-232.
К компьютеру могут быть подключены не только специализированные модули ввода-вывода, но и многие измерительные приборы широкого применения. Например, вольтметр HP 34401A имеет интерфейс RS-232 и может быть подключен к компьютеру и программам, поддерживающим COM-технологию (например, MS Excel) с помощью СОМ-объекта RL232man фирмы RealLab! (рис. 1.2), подробнее см. раздел "Программное обеспечение".
Типовыми применениями описанной системы может быть домашняя автоматизация [Богданов], испытательный стенд для тестирования серийной продукции [Денисенко], лабораторные работы в ВУЗе, локальное управление технологическим процессом, контроль температуры в теплице или элеваторе, см. "Примеры применения" на вебсайте RealLab!.
1.1.3. Распределенные системы автоматизации
С ростом количества датчиков, увеличением площади территории, на которой расположена автоматизированная система и усложнением алгоритмов управления становится более эффективным применение распределенных систем [Bertocco, Vyatkin - Хазарадзе]. Распределенные системы состоят из множества территориально разнесенных контроллеров и модулей ввода-вывода. При таком подходе структура распределенной системы и структура алгоритма ее работы становятся подобны структуре самого объекта автоматизации, а функции сбора, обработки данных, управления и вычисления оказываются распределенными среди множества контроллеров. Каждый контроллер работает со своей группой устройств ввода-вывода и обслуживает определенную часть объекта управления. В частности, технологическое оборудование, как правило, выпускается с уже встроенными ПЛК. Тенденция децентрализации управления и приближения контроллеров к объектам управления является общей для всех систем автоматизации и отчасти навеяна успехами объектно-ориентированного программирования. Кроме того, сосредоточенная система является частью или частным случаем распределенной, поэтому появление распределенных систем является следствием естественного развития от частного к общему.
Распределенную систему управления (РСУ, DCS - Distributed Control System) можно определить как систему, состоящую из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи [Bonastre]. В предельном случае элементы системы могут находиться на разных континентах земного шара, а связь между ними может выполняться через интернет. В качестве "множества устройств" могут выступать любые микропроцессорные устройства, например, ПЛК или разнесенные в пространстве модули ввода-вывода одного контроллера. Однако в последнем случае только сбор данных можно рассматривать как распределенный, в то время как функция управления является сосредоточенной в одном контроллере.
Максимальные преимущества распределенной системы достигаются, когда контроллеры работают автономно, а обмен информацией между ними сведен до минимума.
Распределенная система имеет следующие характеристики, отличающие ее от сосредоточенной:
- большее быстродействие благодаря распределению задач между параллельно работающими процессорами;
- повышенную надежность (отказ одного из контролеров не влияет на работоспособность других);
- большую устойчивость к сбоям;
- более простое наращивание или реконфигурирование системы;
- упрощенную процедуру модернизации;
- большую простоту проектирования, настройки, диагностики и обслуживания благодаря соответствию архитектуры системы архитектуре объекта управления, а также относительной простоте каждого из модулей системы;
- улучшенную помехоустойчивость и точность благодаря уменьшению длины линий передачи аналоговых сигналов от датчиков к устройствам ввода;
- меньший объем кабельной продукции, пониженные требования к кабелю и более низкая его стоимость;
- меньшие расходы на монтаж и обслуживание кабельного хозяйства.
|
|
|
Рис. 1.3. Модель распределенной системы автоматизации в соответствии со стандартом МЭК 61499
|
Распределенная система смягчает также требования к операционным системам (ОС) реального времени (см. раздел "Программное обеспечение"), поскольку задачи распределены между параллельно работающими контроллерами, на каждом из которых установлена отдельная ОС.
Для эффективного проектирования распределенных систем автоматизации необходимы строгие методы их описания. Необходимо также обеспечить совместимость и взаимозаменяемость между собой всех устройств, входящих в систему и выпускаемых разными производителями. Для этих целей был разработан международный стандарт МЭК 61499 "Функциональные блоки для индустриальных систем управления" [IEC] (см. также раздел "Программное обеспечение"). Он используют три уровня иерархии моделей при разработке распределенных систем: модель системы, модель физических устройств и модель функциональных блоков. Модели всех уровней в соответствии со стандартом представляются в виде функциональных блоков, которые описывают процесс передачи и обработки информации в системе.
Особенностью функциональных блоков стандарта МЭК 61499 является то, что они учитывают не только традиционное инициирование выполнения алгоритма с помощью тактирования или временного расписания, но и по признаку наступления некоторых событий (событийное управление). Событийное управление является более общим, а тактирование можно рассматривать как его частный случай, заключающийся в периодическом появлении одного и того же события (сигнала тактирования).
Функциональные блоки (ФБ) могут быть использованы также для поддержания всего жизненного цикла системы, включая проектирование, изготовление, функционирование, валидацию* и обслуживание. Примеры применения стандарта и дальнейшая разработка методики проектирования распределенных систем с его помощью описываются в работах [Hummer - Zoitl].
Модель распределенной системы
Модель распределенной системы автоматизации в соответствии со стандартом МЭК 61499 может быть представлена как набор физических устройств (например, ПЛК), взаимодействующих между собой с помощью одной или нескольких промышленных сетей (рис. 1.3). Сети могут иметь иерархическую структуру.
Функции, выполняемые системой автоматизации, моделируются с помощью программного приложения, которое может располагаться в одном устройстве (например, ПЛК), как, например, приложение В на рис. 1.3, или может быть распределено между несколькими ПЛК, как приложения А и Б. Например, приложение, выполняющее ПИД-регулирование, может располагаться в трех устройствах, из которых первое выполняет функцию ввода данных от датчиков (является модулем ввода), второе выполняет алгоритм регулирования, третье выполняет функцию вывода данных в исполнительное устройство. Вторым примером может быть клиент-серверное приложение, в котором клиент расположен в одном устройстве, сервер - в другом.
Модель физического устройства
|
|
|
Рис. 1.4. Пример модели одного из устройств, показанных на
рис. 1.3 (например, ПЛК2) по стандарту МЭК 61499.
трелками показаны потоки данных и событий
|
Каждое физическое устройство в распределенной системе должно содержать по крайней мере один интерфейс к объекту управления или к промышленной сети и может содержать несколько (в том числе ноль) ресурсов (определение ресурса см. ниже), см. рис. 1.4. При этом устройство по МЭК 61499 рассматривается как конкретный экземпляр определенного типа устройств, по аналогии с объектно-ориентированным программированием. Интерфейс с объектом управления обеспечивает отображение** данных и событий физического процесса (например, аналоговых или дискретных сигналов) в ресурсы и обратно.
В одном устройстве может быть несколько ресурсов и несколько программных приложений. Каждое приложение может исполняться на нескольких устройствах (см. рис. 1.3) и может занимать часть ресурсов в одном устройстве (рис. 1.4).
Коммуникационные интерфейсы выполняют отображение между ресурсами и промышленной сетью. Они могут предоставлять информацию ресурсу в виде данных или событий, а также выполнять дополнительные функции для поддержки программирования, конфигурирования, диагностики и т.д.
Модель ресурса
Ресурс рассматривается как функциональная единица, которая содержится в устройстве (например, в ПЛК), имеет независимое управление своими операциями и обеспечивает различные сервисные функции (сервисы) для программного приложения, включая планирование и исполнение алгоритмов. Ресурс может быть создан, сконфигурирован, параметризован, стартован, удален и т п. без воздействия на другие ресурсы устройства. Примером ресурса может быть память и время, выделенные для выполнения задачи в центральном процессоре.
В функции ресурса входит прием данных или событий от объекта управления или коммуникационного интерфейса, обработка данных и событий и возврат данных и событий в процесс или промышленную сеть, в соответствии с алгоритмом работы программного приложения, использующего данный ресурс.
|
|
|
Рис. 1.5. Модель ресурса распределенной системы по стандарту МЭК 61499
|
В соответствии с рис. 1.5, ресурс моделируется следующими элементами:
- локальным приложением, расположенным в данном физическом устройстве, или частью распределенного приложения. Данные и события, обрабатываемые в локальном приложении, принимаются со входов функциональных блоков (ФБ), которые выполняют операции, необходимые программному приложению;
- отображение событий и данных между программным приложением и объектом управления выполняется специальным функциональным блоком интерфейса (рис. 1.5);
- отображение событий и данных между программным приложением и коммуникационным интерфейсом выполняется таким же специальным функциональным блоком интерфейса (рис. 1.5);
- функция планирования выполняет передачу информации и исполнение программного приложения в соответствии с временными требованиями и очередностью, определяемой появлением событий, взаимодействием между функциональными блоками, а также приоритетами или периодом исполнения задач.
Модель программного приложения
Программное приложение состоит из сети функциональных блоков (подробнее см. раздел "Программное обеспечение"), ветви которой переносят данные и события (рис. 1.6). Поток событий определяет выполнение алгоритмов, содержащихся в функциональных блоках. В состав функциональных блоков могут входить и другие программные приложения (суб-приложения).
Программные приложения могут быть распределены между несколькими ресурсами в одном или в нескольких устройствах (ПЛК). Ресурс реагирует на события, поступающие из интерфейсов, следующими способами:
|
|
|
Рис. 1.6. Модель приложения распределенной системы по стандарту МЭК 61499
|
- планированием и исполнением алгоритма;
- модифицированием переменных;
- генерацией ответных событий;
- взаимодействием с интерфейсами.
Модель функциональных блоков распределенной системы автоматизации подробно описана в разделе "Программное обеспечение".
Архитектура системы с общей шиной
Архитектура распределенной системы промышленной автоматизации на основе общей шины показана на рис. 1.7. Для того, чтобы получить данные из модуля или контроллера, компьютер (или контроллер) посылает в шину его адрес и команду запроса данных. Микропроцессор, входящий в состав каждого модуля или контроллера, сверяет адрес на шине с его собственным адресом, записанным в ПЗУ, и, если адреса совпадают, исполняет следующую за адресом команду. Команда позволяет считать данные, поступающие на вход устройства, или установить необходимые данные на его выходе.
Распределенная система с общей шиной порождает две новые проблемы по сравнению с топологией "точка-точка" (когда соединяются только два устройства, как на рис. 1.1): необходимость адресации устройств и необходимость ожидания в очереди. Добавление адреса в коммуникационный пакет снижает скорость обмена при коротких сообщениях, а обмен по общей шине приводит к тому, что каждое устройство для передачи сообщения должно ждать, когда шина станет свободной. Это замедляет скорость обмена между устройствами по сравнению с топологией "точка-точка". Задержка в сетях с большим количеством устройств становится существенным ограничением на применение топологии с общей шиной [Kim] в некоторых приложениях, в частности, в случае ПИД-регулирования, когда задержка в сети ограничивает тактовую частоту работы контура регулирования. Для таких случаев используют локальные подсети или локальные технологические контроллеры.
Распределенные системы позволяют решить также следующую проблему. С ростом количества датчиков в системе, показанной на рис. 1.1, увеличивается число и суммарная длина проводов, соединяющих датчики с устройством ввода. Это приводит не только к росту стоимости кабельного оборудования, но и к проблемам, связанным с электромагнитными наводками, особенно если датчики распределены по большой площади (например, в промышленной теплице датчики распределены по площади около 6 Га, а в элеваторе число датчиков достигает 3...5 тыс. шт.). В распределенной системе модули ввода-вывода изготавливаются с небольшим количеством входов (обычно от 1 до 16), а сами модули располагаются вблизи места установки датчиков. Увеличение количества датчиков (входов) достигается путем наращивания числа модулей и объединения их с помощью общей шины. Это сокращает общую длину проводов в системе, а также длину проводов с аналоговыми сигналами.
Связь отдельных устройств в распределенной системе может осуществляться с помощью любой промышленной сети, см. раздел "Промышленные сети и интерфейсы". Наиболее распространены в России сети Profibus, что связано с популярностью изделий фирмы Siemens, а также сети Modbus с физической шиной RS-485 благодаря распространенности модулей и контроллеров фирм ICP DAS, Advantech и RealLab!. За последние годы стремительно возросло количество используемых сетей Ethernet (точнее, Industrial Ethernet) в качестве промышленных сетей при скорости передачи 10, 100 и 1000 Мбит/с.
Некоторые модули ввода-вывода, входящие в состав распределенных систем, позволяют по команде из компьютера выполнять функции автоматического регулирования (например, модули NL-8TI, NL-16AI фирмы RealLab!). Для этого в них посылают значение уставки и параметры ПИД-регулятора (пропорциональный, дифференциальный и интегральный коэффициенты), затем команду запуска процесса регулирования. Наличие ПИД-регулятора в модулях распределенной системы позволяет осуществить локальное регулирование (например, поддержание стабильной температуры в камере тепла и холода), разгрузив общую шину для выполнения других задач.
Распределенные системы строятся, как правило, из коммерчески доступных компонентов (ПЛК, модулей ввода-вывода, датчиков, исполнительных устройств). Однако для однотипных тиражируемых систем может быть выгодно строить специализированные системы, состоящие из полностью заказных (вновь спроектированных) аппаратных и программных средств [Garcia]. Граница целесообразности такого подхода определяется объемом выпуска изделий.
Программирование распределенных систем автоматизации выполняется стандартными средствами, рассмотренными в разделе "Программное обеспечение".
* Валидация - подтверждение соответствия системы требованиям ее назначения. Выполняется с участием потребителя. Не путать с верификацией - доказательством достоверности. Валидация - это верификация с участием потребителя (терминология стандарта ИСО 9001)
** Отображение - закон, по которому каждому элементу одного множества ставится в соответствие единственный элемент другого множества
1.1.4. Многоуровневая архитектура
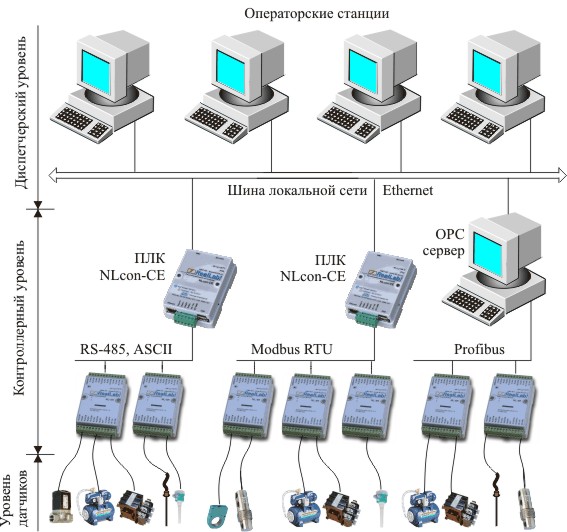
Промышленная сеть может быть подключена не только к одному компьютеру, как показано на рис. 1.7, но и к сети компьютеров, например, к локальной сети Ethernet (рис. 1.8) или глобальной сети Internet. Такая архитектура автоматизированной системы удобна при коллективной работе с системой автоматизации или для связи технологического уровня АСУ с управленческим. Например, при использовании системы с архитектурой, показанной на рис. 1.8, температуру в теплице или в силосах элеватора одновременно могут наблюдать дежурный оператор, главный инженер и директор хозяйства. На алюминиевом заводе [Хазарадзе] информация о ходе протекания процесса электролиза алюминия используется на 50 рабочих местах локальной компьютерной сети.
|
|
|
Рис. 1.8. Типовая современная распределенная система автоматизации, включающая три уровня иерархии (см. также рис. 1.9).
|
Доступ любого компьютера сети к устройствам ввода-вывода или контроллерам осуществляется с помощью ОРС-сервера (см. раздел "Программное обеспечение" и [Iwanitz]). OPC серверы могут располагаться на нескольких компьютерах или контроллерах и доступ к любому из них может осуществляться с любого компьютера сети. Пример архитектуры такой системы показан на рис. 1.8. Она является достаточно общей и широко используется как для лабораторной автоматизации, так и для автоматизации технологических процессов. Отдельные промышленные сети на рис. 1.8 могут иметь различные протоколы и содержать оборудование разных производителей, а также различную физическую среду передачи данных - оптоволокно, медные провода, радиоэфир (через радио- или GSM-модемы) и др. Обычно ОРС сервер работает только с одним или несколькими портами ввода-вывода компьютера, к каждому из которых подключена одна промышленная сеть, поэтому количество ОРС серверов в системе меньше или равно количеству промышленных сетей. Благодаря наличию сети Ethernet в систему легко могут быть включены серверы баз данных, коммуникационные серверы, веб-серверы, принтеры, плоттеры, АТС, факсы, технологическое оборудование и другие устройства с Ethernet-интерфейсом [Шехтман].
Основой программного обеспечения, установленного на компьютерах сети, являются SCADA пакеты - программные средства диспетчерского управления и сбора данных. В контроллерах исполняются загрузочные модули программ, генерируемые средствами визуального программирования ПЛК на языках стандарта МЭК 61131-3, см. раздел "Программное обеспечение".
Системы управления с многоуровневой архитектурой обычно строятся по объектному принципу, когда структура системы выбирается подобной структуре объекта автоматизации, а каждая подсистема является локальной, т.е. все обратные связи замкнуты в пределах этой подсистемы. Каждая локальная подсистема выполняет отдельную функцию, задаваемую логикой функционирования всей системы. Объектный принцип построения позволяет упростить проектирование многоуровневой системы и обеспечить ее структурную (архитектурную) надежность.
Анализ сложных систем управления позволяет выделить в них несколько однородных уровней иерархии, показанных на рис.1.9. Здесь WAN -"Wide Area Network" - глобальная сеть, LAN - "Local Area Network" - локальная сеть.
Низший (нулевой) уровень включает в себя датчики и исполнительные устройства (актуаторы): датчики температуры, давления, концевые выключатели, дискретные датчики наличия напряжения, измерительные трансформаторы, реле-пускатели, контакторы, электромагнитные клапаны, электроприводы и др. Датчики и актуаторы могут иметь интерфейсы типа AS-интерфейс (ASI), 1-Wire или CAN, HART и др. Морально устаревшими интерфейсами нулевого уровня являются аналоговые интерфейсы 4...20 мА, 0...20 мА, 0...5 В и др. В настоящее время наметилась устойчивая тенденция к использованию интеллектуальных датчиков, которые имеют цифровой интерфейс, встроенный микроконтроллер, память, сетевой адрес и выполняют автоматическую калибровку и компенсацию нелинейностей датчика. Интеллектуальные датчики в пределах сети должны обладать свойством взаимозаменяемости, в частности, иметь один и тот же протокол обмена и физический интерфейс связи, а также нормированные метрологические характеристики и возможность смены адреса перед заменой датчика.
Первый уровень состоит из программируемых логических контроллеров и модулей аналого-цифрового и дискретного ввода-вывода, которые обмениваются информацией по промышленной сети (Fieldbus) типа Modbus RTU, Modbus TCP, Profibus и др. Иногда модули ввода-вывода выделяют в отдельный уровень иерархии.
|
|
|
Рис. 1.9. Уровни иерархии современной АСУ [Lian]
|
Второй (диспетчерский) уровень состоит из рабочих станций - компьютеров с человеко-машинным интерфейсом (ЧМИ, HMI - Human Machine Interface), наиболее распространенными вариантами которого являются SCADA-пакеты. Диспетчер (оператор) осуществляет наблюдение за ходом технологического процесса или управление им с помощью мнемосхемы на экране монитора компьютера. Диспетчерский компьютер выполняет также архивирование собранных данных, записывает действия оператора, анализирует сигналы системы технической диагностики, данные аварийной и технологической сигнализации, сигналы срабатывания устройств противоаварийных защит, а также выполняет часть алгоритмов управления технологическим процессом. Благодаря объединению диспетчерских компьютеров в сеть наблюдение за процессами может быть выполнено с любого компьютера сети, но управление, во избежание конфликтов, допускается только с одного компьютера или функции управления разделяются между несколькими компьютерами. Права операторов устанавливаются средствами ограничения доступа сетевого сервера. Важной частью второго уровня являются также базы данных реального времени, являющиеся хранилищами информации и средством обмена с третьим уровнем иерархии системы управления.
Третий уровень (уровень управления цехом) появляется как средство интеграции системы АСУ ТП с АСУП - автоматизированной системой управления предприятием. АСУП, в зависимости от размеров корпорации, может включать еще более высокий (четвертый) уровень и обеспечивать интеграцию с высшим руководством, которое может быть расположено в различных странах и на разных континентах земного шара. На уровне АСУП решаются следующие задачи:
- ERP (Enterprise Resource Planning) - планирование ресурсов предприятия;
- MRP (Manufacturing Resource Planning) - планирование ресурсов технологических подразделений предприятия;
- MES (Manufacturing Execution Systems) - управление производственными ресурсами;
- HRM (Human Resource Management) - управление человеческими ресурсами;
- EAM (Enterprise Asset Management) - управление основными фондами, техническим обслуживанием и ремонтами.
Количество уровней АСУ зависит от величины предприятия.
В последние годы большой интерес вызывало использование интернет-технологий в задачах управления, причем не только на уровне корпоративного управления, но даже на уровне технологического оборудования. Для этих целей используются web-серверы, которые могут быть расположены как на обычных персональных компьютерах, так и непосредственно в контроллерах или модулях ввода-вывода (так называемые микро web-серверы). С помощью любого web-браузера, например Internet Explorer, можно управлять технологическими процессами, открыв на микро-веб-сервере интернет-страничку с мнемосхемой технологического процесса, см. следующий раздел.
|
|